
It is interesting to note how and why certain design decision were made regarding their design of the pedal-powered single person submarine named Chinook. The following is adapted from a report from the UVic Submarine Racing Club:
This is the second post of the series about SSI’s cooperation with the UVic Submarine Racing Club. Previous post: “More Engineers Needed: SSI Responds” Next Post: “SSI Schools Student Submarine Racers”
Hull Design

A key decision was made regarding the material: the hull was made of fiberglass instead of carbon fiber because the weight of the submarine is fixed based on displacement, i.e. any weight saved from using carbon fiber would just translate to less foam used to achieve neutral buoyancy.
For safety, the hull seam was on a horizontal plane rather than vertical so that the entire forward section could double as an escape hatch. Mounting points for internal structure were placed on the hull to allow components to be easily removed. Finally, to save money on transportation to the competition in England, the hull was split into 4 sections so that it could fit into luggage on an over-sized piece of luggage on a plane. Clever.
Propulsion System Design
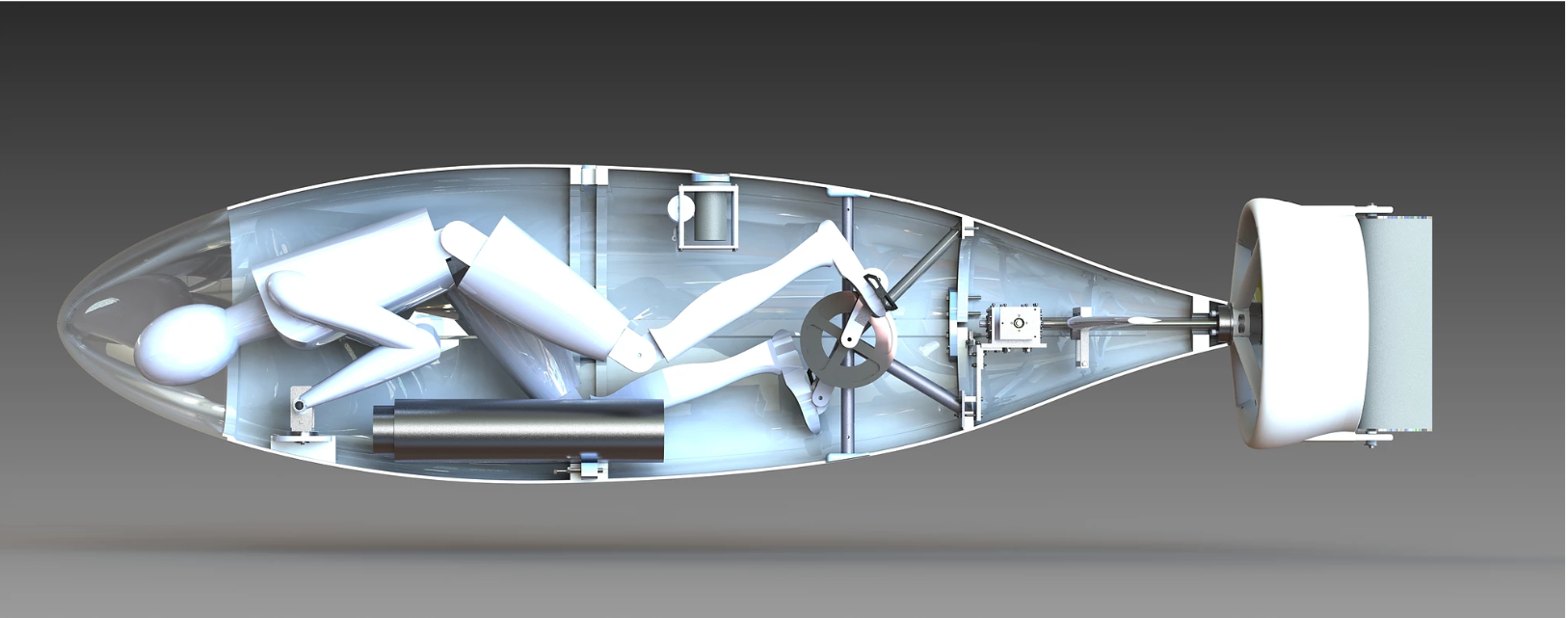
As noted, the propulsion of the sub would be pedal powered. In order to accommodate a wide variety of potential drivers, the club used an adjustable shoulder brace so that they could choose the driver with the best overall performance during testing, rather than the smallest person who could fit.
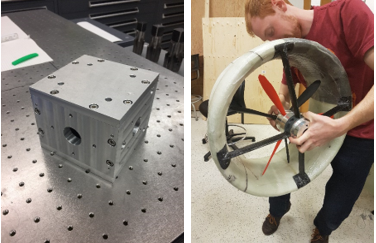
The aluminum support system was made so that it could be tested outside the sub and the gearbox was also designed to be optimized during testing based on efficiency calculations and power requirements.
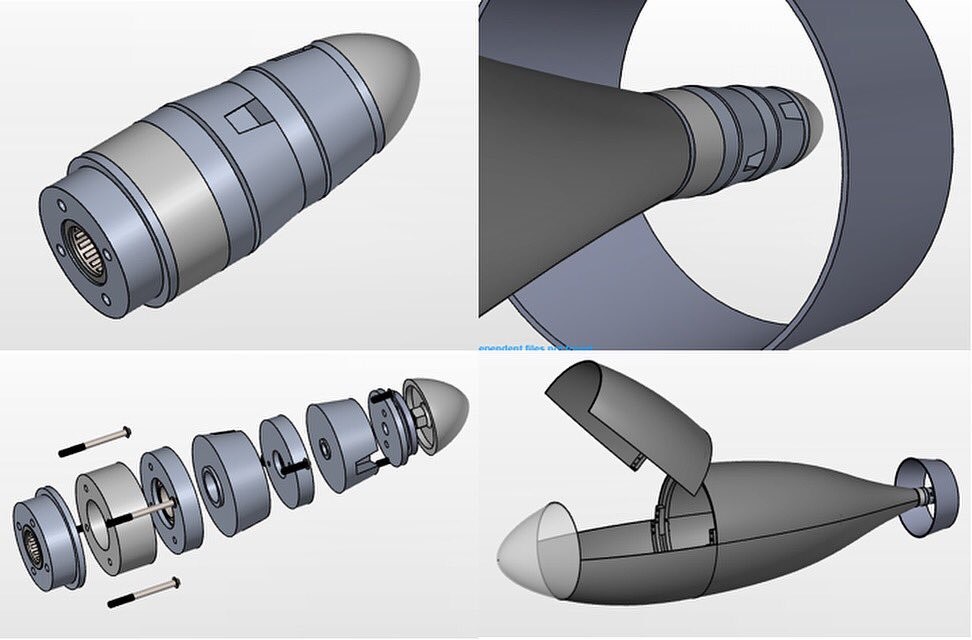
Also, to help overall efficiency, the design implemented a Kort nozzle propulsion system that eliminated the vortexes forming at the tip of the blades and redirected the flow of fluid to a concentrated direction. This allowed a rudder to be implemented after the propeller blades.
Steering Control System
Since the rudder was placed behind the propeller blade, it allowed the sub to attain a higher “turning moment” due to lifting forces of the rudder being farther away from the center of gravity. Steering was also improved due to the Kort Nozzle because it produced a more uniform mass flow to the rudder. Spaded design diving planes were chosen to reduce drag forces.
But besides all these technical details, you might be wondering how the sub is actually steered and controlled. The answer is that it is controlled by with a handlebar attached by cables to the rudder and dive planes. The drive steers with a side to side motion. With a rotating throttling motion on the handle bar (like a motorcycle), the driver controls the dive planes.
Stability-Buoyancy System

The sub has air diaphragms throughout its length. PVC foam pockets create positive buoyancy and are counterweights to create a low center of gravity. Interestingly, the team implemented a buoyancy compensating device (BCD) because they learned that it is common during the race for submarines to lose weight as air is released from the air tanks. A BCD was designed to ensure level race completion by accounting for the change in mass.
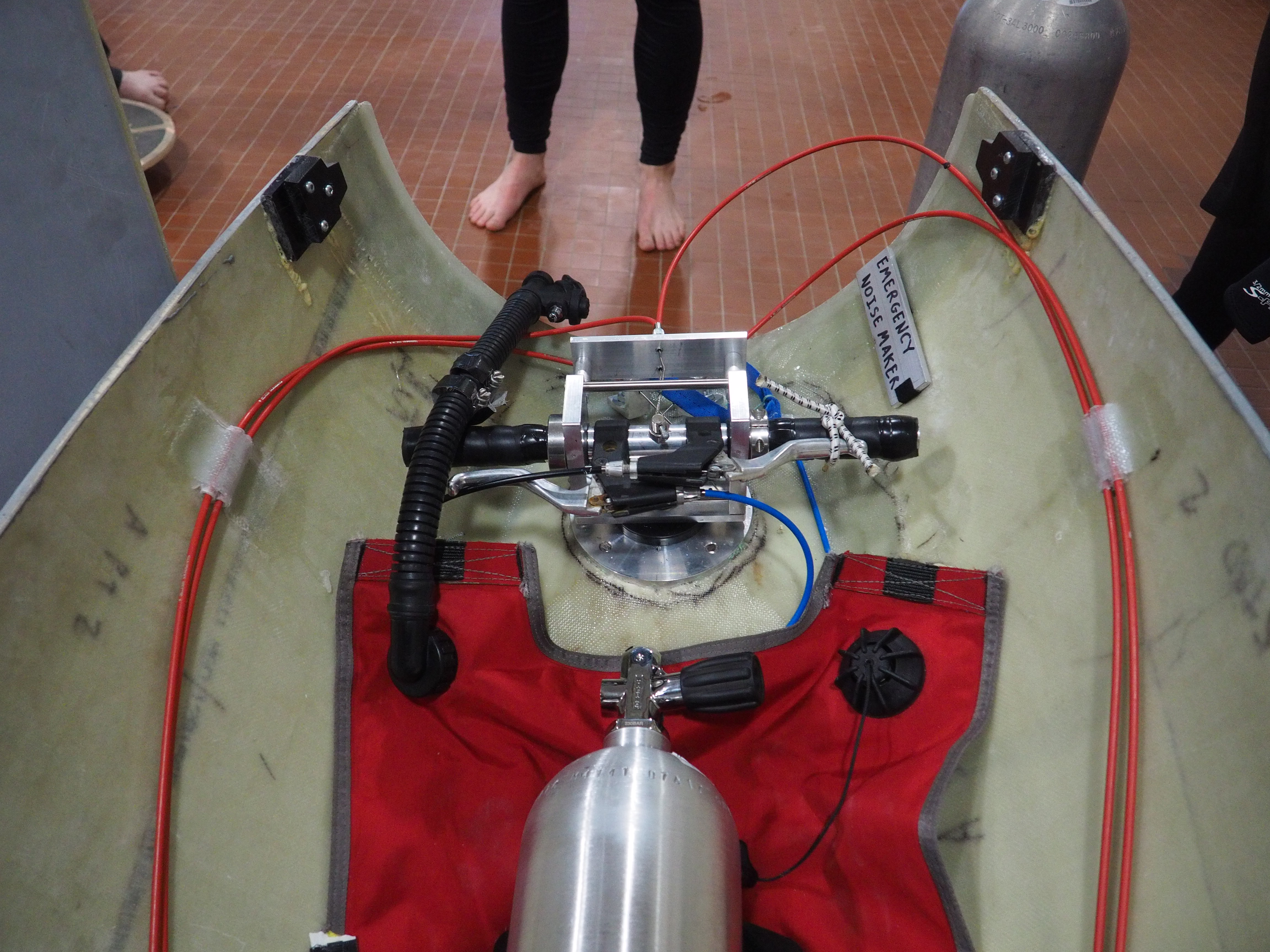
Safety Release System

Finally, since safety could not be overlooked, as per the competition rules, the sub has a high visibility surface maker buoy which can be released by the pilot to signal if help is required. If things are really serious, using a “dead man’s switch” in the form of a clutch, the safety buoy is released automatically if the pilot is incapacitated and unable to squeeze the clutch handle.
Summary
As you can see, despite never having been part of this competition, the UVic team put a lot of thought into the design of their submarine Chinook. SSI is happy to have been a part of this project.